Light-Weight Autonomous UAV for Obstacle Avoidance
- Description: Developed a light-weight Unmanned Aerial Vehicle (UAV) equipped with LiDAR and Intel RealSense D435i cameras. Implemented Fast LIO (LiDAR-Inertial Odometry) and integrated it with a PX4 IMU to increase odometry frequency. Achieved fully autonomous navigation without relying on external localization systems such as GPS.
- Role and Contribution:
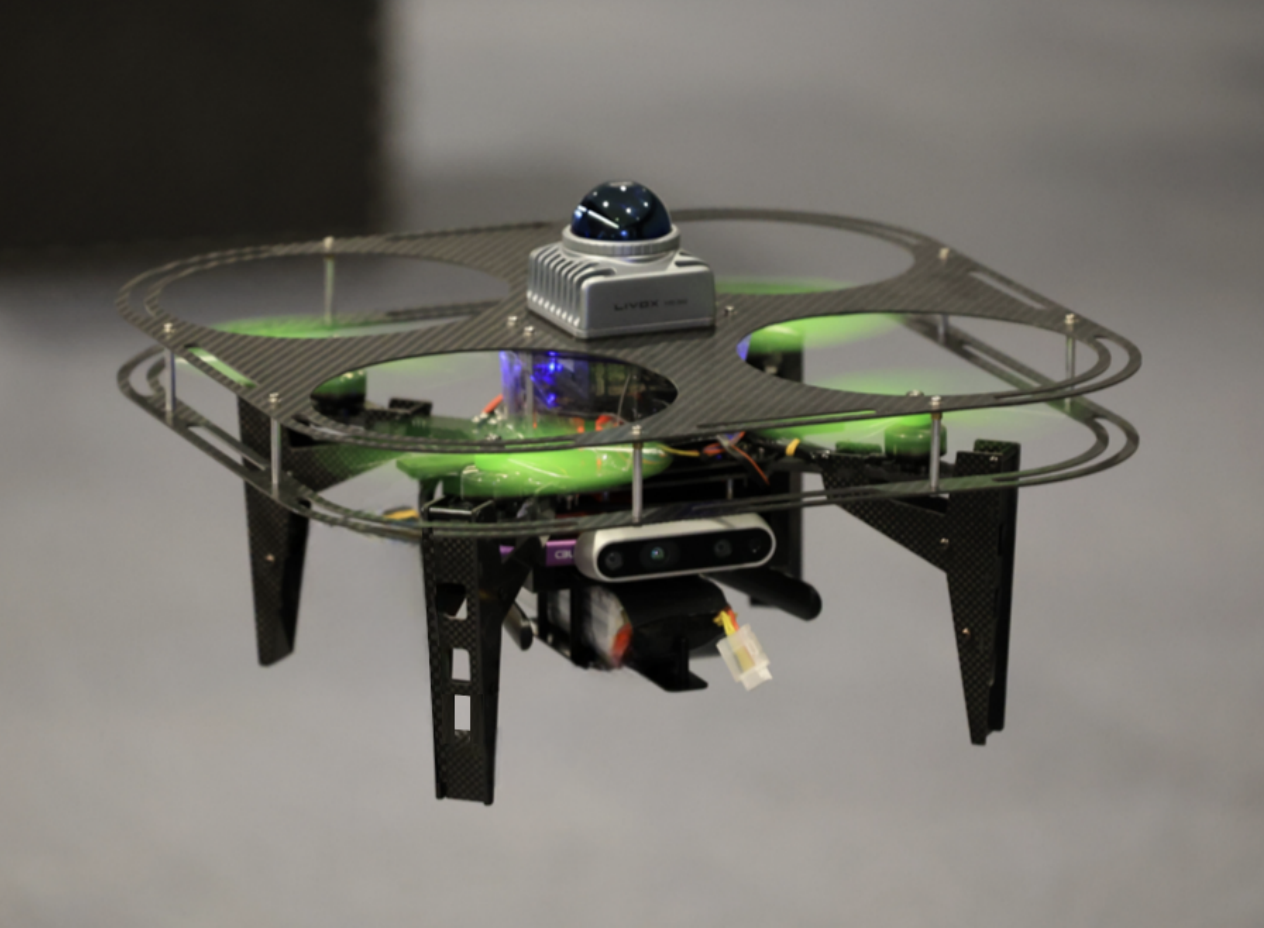
- Designed a lightweight UAV platform equipped with LiDAR, RGB-D camera, onboard computer, flight controller, and additional sensors to ensure reliability in various conditions.
- Achieved accurate and reliable LiDAR-based localization in GPS-denied environments, addressing critical challenges in autonomy.
- Developed a durable platform design to minimize the risk of drone crashes, ensuring operational stability in complex and confined spaces.
- Autonomous Flight & Obstacle Avoidance Framework: [PDF]
Tech Stack
- Hardware:
- Sensors:
- LiDAR: For precise distance measurements and obstacle detection.
- Intel RealSense D435i: Provides RGB-D information
- PX4 IMU: High-precision IMU(Inertial Measurement Unit) for motion tracking.
- Flight Controller: PX4 Flight Controller for managing UAV operations.
- Processing Unit: NVIDIA Jetson Orin NX for onboard computing.
- Communication: Wi-Fi and telemetry modules for data transmission and remote control.
- Software:
- Operating System: Ubuntu 20.04 LTS
- Flight Stack: PX4 Autopilot for flight control and navigation.
- Localization & Mapping: FAST-LIO2 for real-time localization.
- Programming Languages: C++, Python
- Middleware: ROS Noetic for managing communication between different system components.
- Obstacle Avoidance Algorithms: Custom algorithms integrated with sensor data for real-time obstacle detection and avoidance.
Key Features
- Autonomous Navigation: Capable of navigating complex environments without GPS by utilizing LiDAR and visual sensors for real-time localization and mapping.
- High Odometry Frequency: Enhanced odometry frequency through the integration of Fast-LIO2 and PX4 IMU, ensuring accurate and stable flight control.
- Light-Weight Design: Optimized for minimal weight to extend flight duration and improve maneuverability.
- Modular Architecture: Designed with modularity in mind, allowing for easy upgrades and maintenance of hardware and software components.
Additional Resources
